Small precision servo steering gear cover







| Mould NO. | CPM-150226 |
| Surface Finish Process | VDI-24 |
| Plastic Material | PA66+30GF |
| Part weight | 18.65g |
| Design Software | UG |
| Part size | 45.00*25.0*18.0 mm |
| Customized | Customized |
| Application | Connectors |
| Mould size | 250 * 250 * 311mm |
| Part Name | Small precision servo steering gear cover |
| Mould Cavity | 1*2 |
| Runner | Cold runner for sub gate |
| Standard | DME |
| Mould Material | S136/S50C/S-7/BeCU |
| Mould Life Cycle | 1,000,000 |
| Lead Time | 25 days |
| Mould Cycle Time: | 25's |
| Payment | T T |
Application field
In industrial type servo motors the position feedback sensor is usually a high precision encoder, while in the smaller RC or hobby servos the position sensor is usually a simple potentiometer. The actual position captured by these devices is fed back to the error detector where it is compared to the target position. Then according to the error the controller corrects the actual position of the motor to match with the target position.
Hobby servos are small in size actuators used for controlling RC toys cars, boats, airplanes etc. They are also used by engineering students for prototyping in robotics, creating robotic arms, biologically inspired robots, humanoid robots and so on.
The potentiometer is attached on the final gear or the output shaft, so as the motor rotates the potentiometer rotates as well, thus producing a voltage that is related to the absolute angle of the output shaft. In the control circuit, this potentiometer voltage is compared to the voltage coming from the signal line. If needed, the controller activates an integrated H-Bridge which enables the motor to rotate in either direction until the two signals reach a difference of zero.
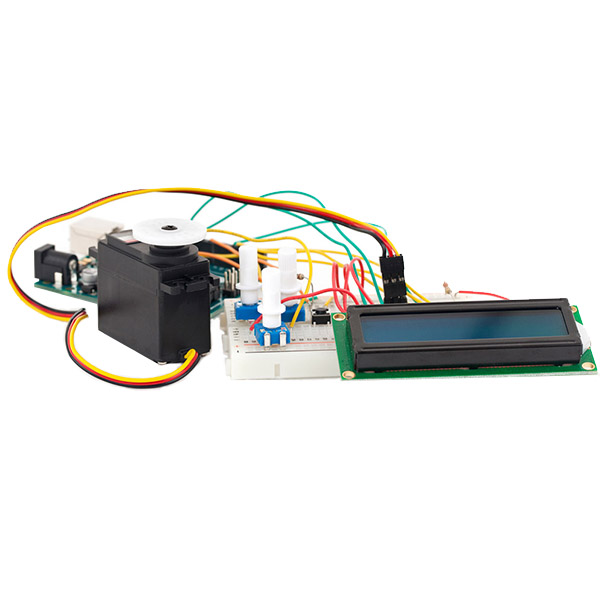
A servo motor is controlled by sending a series of pulses through the signal line. The frequency of the control signal should be 50Hz or a pulse should occur every 20ms. The width of pulse determines angular position of the servo and these type of servos can usually rotate 180 degrees (they have a physical limits of travel).
Generally pulses with 1ms duration correspond to 0 degrees position, 1.5ms duration to 90 degrees and 2ms to 180 degrees. Though the minimum and maximum duration of the pulses can sometimes vary with different brands and they can be 0.5ms for 0 degrees and 2.5ms for 180 degrees position.
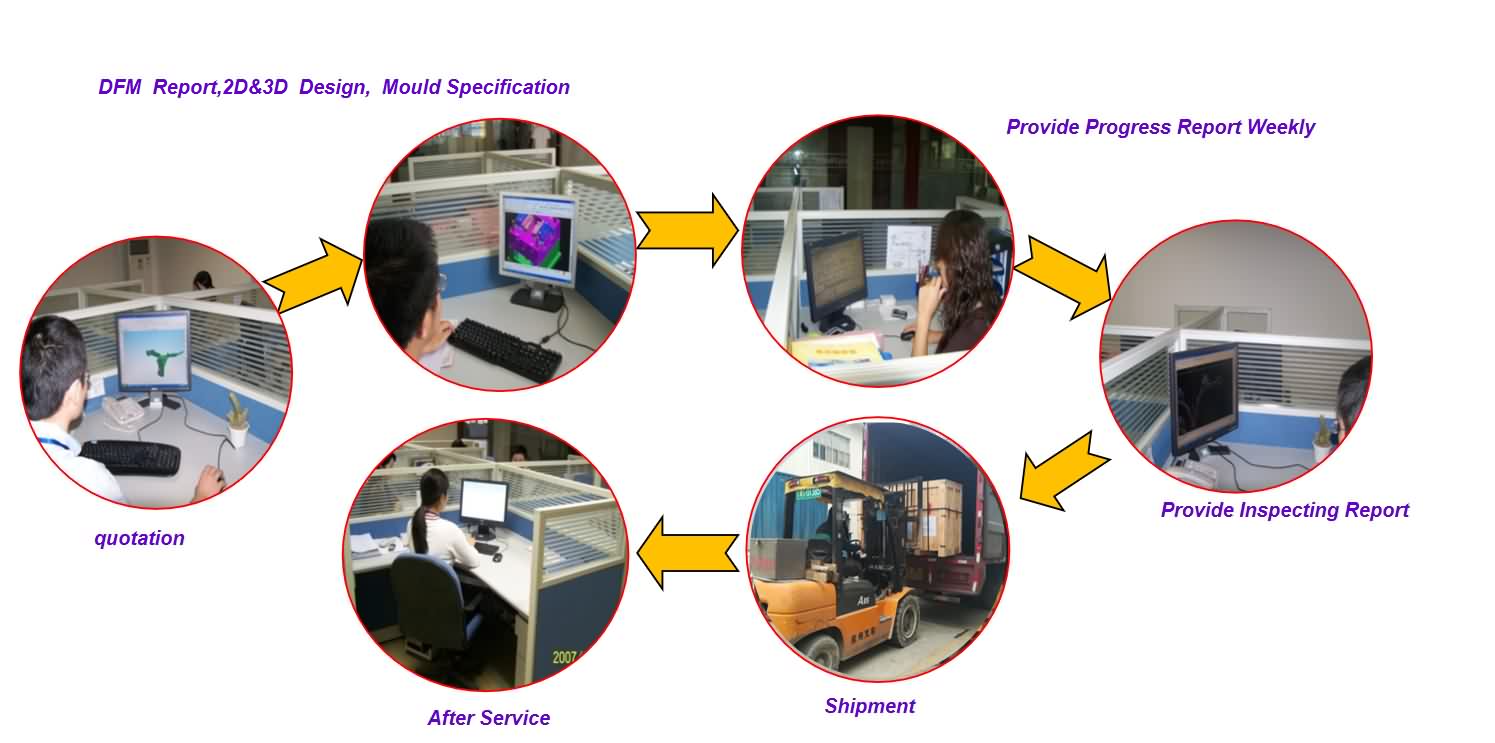
Project Management

Mould Workshop






Customer visit
Creating value for customers and making it perfect is our philosophy. You will realize greater profits by working together with CPM!





Mould standard
We are experienced in all kinds of steels and fittings of international standard

Packaging&Warehousing

